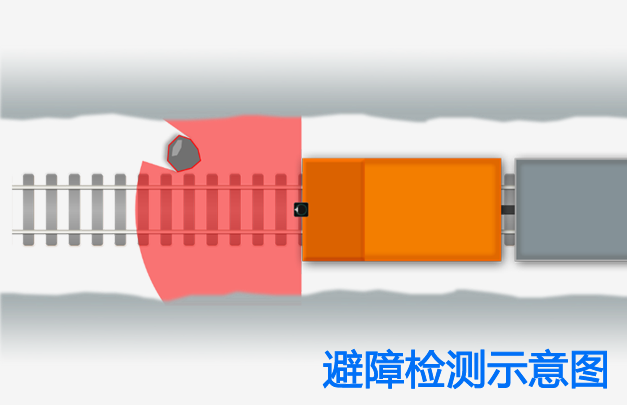
AGV避障系统
该方案通过激光雷达配合相关算法,可在矿车工作过程中实时监测前方路况,在发现障碍物时立刻发送报警信号至后端PLC控制系统,辅助列车控制系统进行减速或停车,避免发生安全事故。

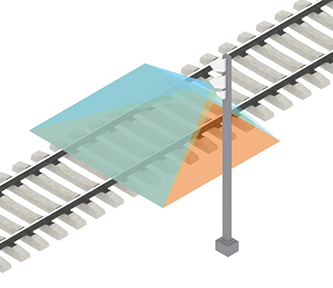
实时动态扫描
实时动态扫描

适应性强
设备投入应用前全部经过粉尘测试、外界强光干扰测试、自身对谢干扰检测以及雨雾横批测试等,适应性强。

多级防区避障
多级防区避障

接口协议丰富
支持modbusTCP、modbusRTU、 opc UA等通信协议
COPYRIGHT © 1997-2021保定市新168幸运飞飞艇 ALL RIGHTS RESERVED 冀ICP备20571573号-1 DESIGN BY SZHD